A
Anonymous
Mar 28, 2026
Rating: 5/5
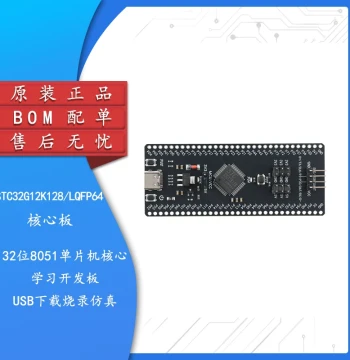
Excellent STM32 implementation
Love that it uses the standard STM32 chip so I can program it directly with STM32CubeIDE if I don't want to use the pre-loaded firmware. Very flexible for custom projects.













![[Youxin Electronics] GP2Y0E03 Infrared Distance Sensor Module 4-50cm Range](https://www.gosteppe.com/cache/medium/product/74667/legacy-main-4da8cadc5fc82afe91b124e3.webp)






![[Trial Pack] Xianlang Complete Cat Treat Sticks Meal Packs Main Course Cans Freeze-Dried Cat Food Sample Snacks Gift Set](https://www.gosteppe.com/cache/medium/product/208273/legacy-main-9ec245ebf781f65a434ba854.webp)



























![[Ali Health] Dental Implant Initial Consultation Package, Oral Cavity Filling, Crown, Denture, and Implant Assessment](https://www.gosteppe.com/cache/small/product/268910/legacy-main-034f7c58b79ebda262b6a7f8.png)