A
Anonymous
Apr 12, 2026
Rating: 4/5
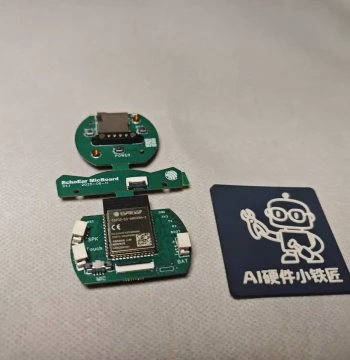
Good Sensor, Tricky Calibration
Works well once calibrated, but getting the calibration status to reach full accuracy took some patience. The hardware itself is solid and compact.








































![[Daimai Holds Micro-Needle Hair Transplant Patent] Little Red Cap Hydro Glow | Scalp Hydration and Repair](https://www.gosteppe.com/cache/small/product/270424/legacy-main-ecbdc6ee4688639f4a8ef150.webp)











![MOOCAT [Postage Stamp Stub] Hand-Drawn Blank Irregular Wood Pulp Fine-Texture Paper for Cyanotype, OC Signing, and Collage](https://www.gosteppe.com/cache/small/product/270412/legacy-main-3037a70329c5379f7064bc16.webp)